Overview
|
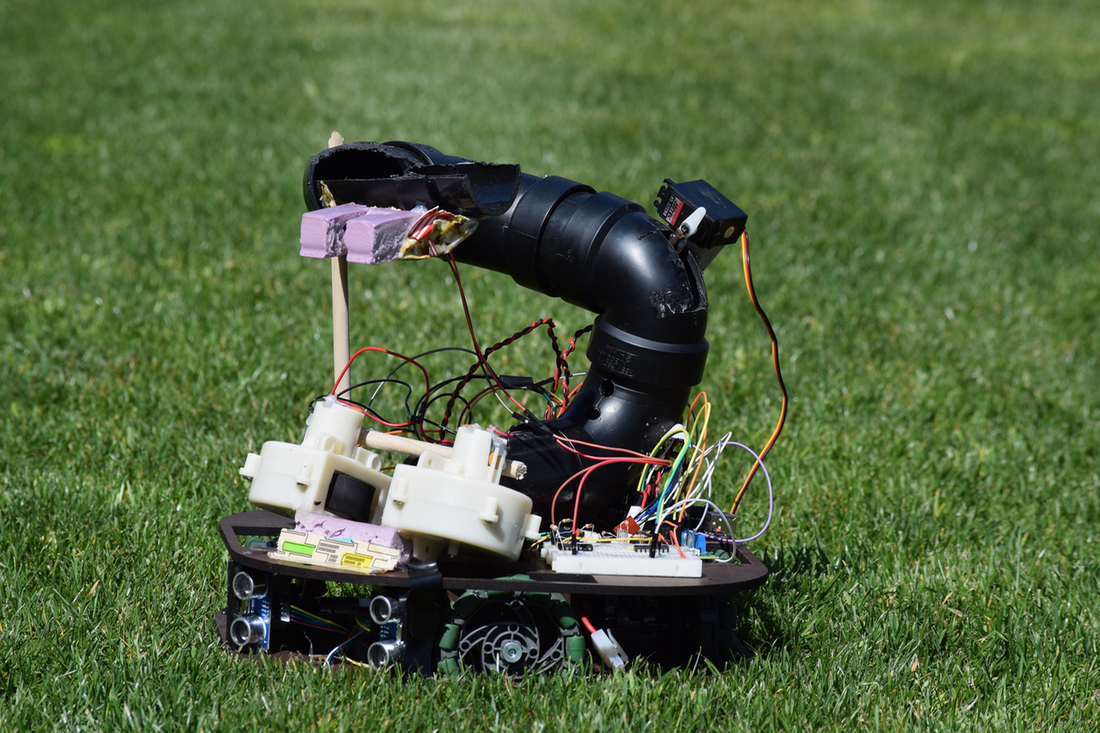
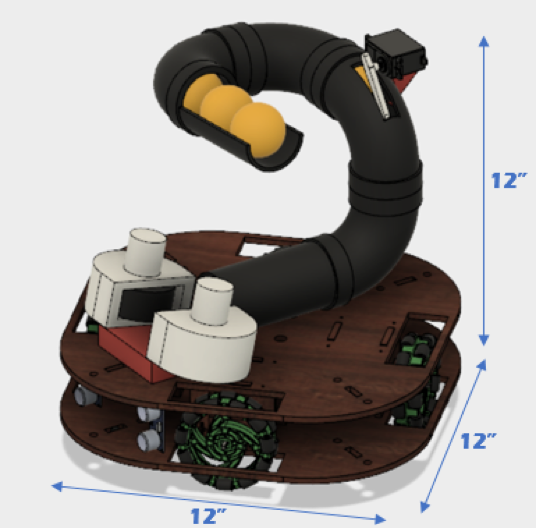
In order to simplify the design process, the robot was divided into two main layers: the drive system and the launcher. Each layer is built from ¼” Duron sheets, fabricated through laser cutting. The first layer contains all the necessary parts to mobilize the system, including the wheels, motors, infrared sensors, and ultrasonic sensors. The second layer consists of the launcher mechanism, which includes launcher motors, servo motor, feeder pipe, and phototransistor.
We chose to use 4 omniwheels to navigate the course efficiently and without the need to turn much. We used ultrasonic, IR tape, and a phototransistor as sensors to detect the elements of the playing field. We used two flywheel-motor assemblies fed by a PVC pipe ball hopper to launch balls at opposing targets. Lastly, we powered the robot with 2 Tower Hobbies 2000 NiMH batteries. All of this was tied together with a single Arduino Uno. The individual components used are listed in the Bill of Materials. A few other specifications highlighting the robot's functionality:

|
|
