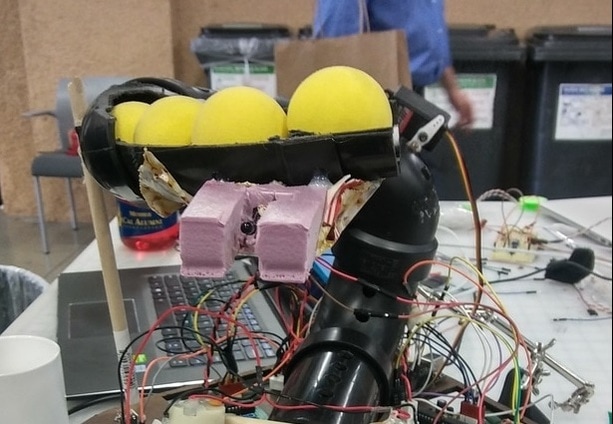
hopper
Our scorpion-like launching system was designed with simplicity in mind. 9 balls are fed into a combination of 2” PVC tubing using an external loading tube. This gravity feed allows for rapid and precise reloading. The tube is rounded to accommodate as many balls as possible while maintaining a sufficient angle for the balls to reliably roll. The top of the tube is cut in half due to the twelve inch height limit. Many teams designed their ball hopper like a pistol revolver, spinning the cartridge until one ball falls into a hole. This design requires significantly more supports and volume. Reloading a revolver system takes longer and is more cumbersome than our tube design.
servo gate
A HITEC HS-322 HD servo motor was used to control ball feeding. It ensured accurate and repeatable motion to release one ball at a time. Powered by 5 Volts, the servo motor received a signal from the Arduino to open and close to precise positions. The signal was sent at one second intervals during launching to allow the launching motors to recover their speed in between balls.

|

|
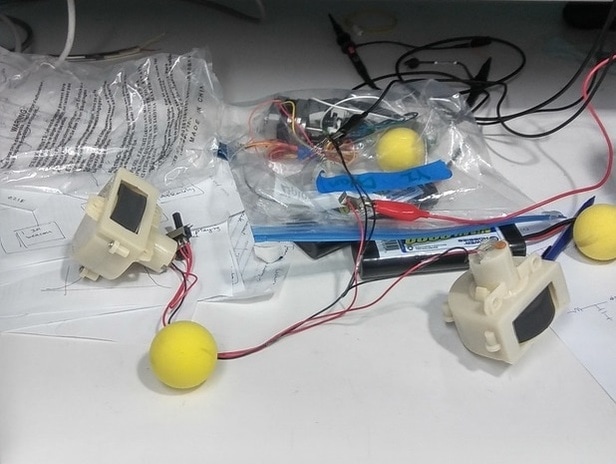
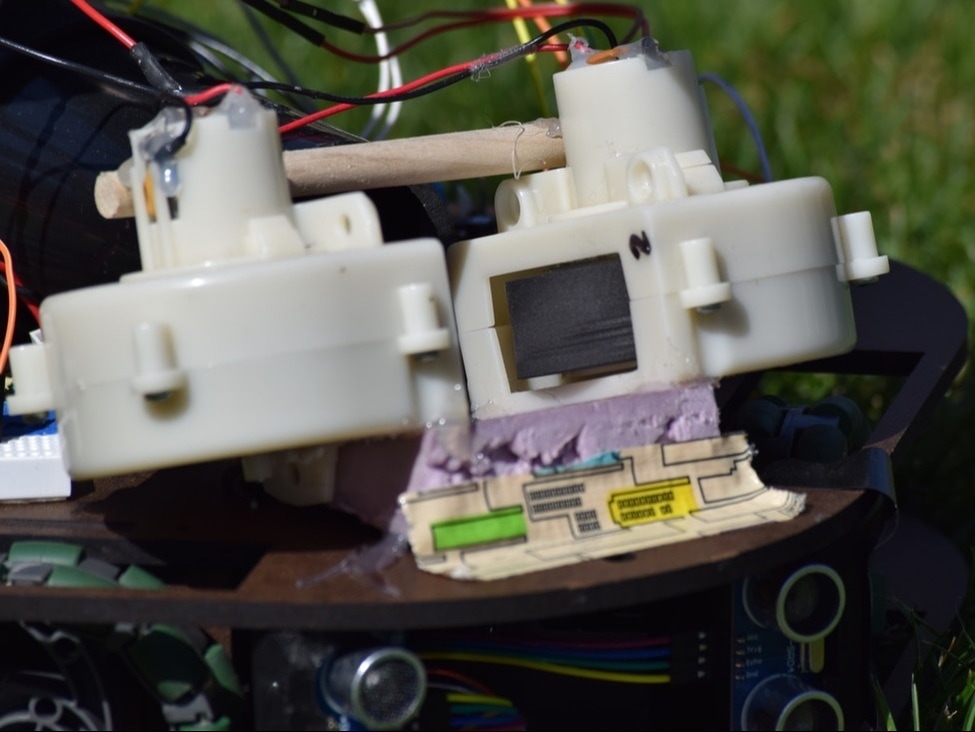
Launchers
For our launcher motors, we used the motor and flywheel combinations offered by ME218. The launcher motors are aligned at 14 degrees from horizontal on a foam pad. The motor pads slightly squeeze the ball to reduce slipping and increase accuracy. They run 3000 rpm at 3 volts. These values were calculated by the height and distance the ball needed to travel. When the launching sequence was initiated, a 5 second spin up period was used to ensure the motors were spinning at a sufficient speed. The motors were controlled with a NMOS gate. A power resistor network reduced the input voltage of 14 volts directly from the batteries to 3 volts.
|
|
