OverviewWe began first by breaking down the project specifications to identify the main components we would need for our bot. We needed to have a system capable of orienting and maneuvering out of the starting area (the "safe space"), find a pressure sensor (the "fact checker"), and then launch Nerf balls ("alternative facts") into opposing towers ("social media sites"). We could navigate using tape on the board, use the various beacons, or use distance measurements. To accomplish this, we needed three main hardware systems:
|
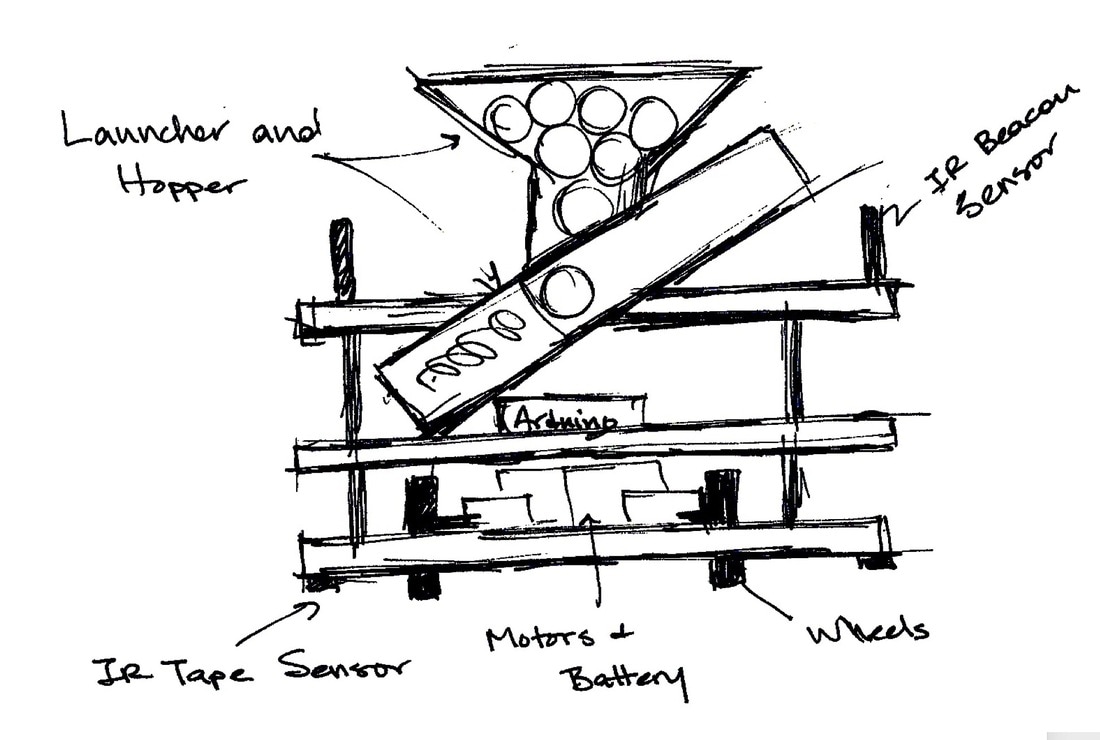
First sketch of overall design
|
Approach
We initially divided and conquered each of these main systems across our team to prototype individual components. We then quickly integrated. First, the drive system and sensors were integrated, then the launch system. A CAD model was generated early on to make sure all of the components would fit within the 12" x 12" x 12" size requirement.
Our strategy of escaping the safe space was simple, and motivated our choice of sensors:
Once the components were assembled, extensive testing, debugging, and refinement was required to get the bot ready to checkoff.
Our strategy of escaping the safe space was simple, and motivated our choice of sensors:
- Rotate until the ultrasonic sensors detect the closest wall with the ultrasonic sensors
- Continue rotating until it detects the north wall of the playing field
- Move south until the south tape sensor was triggered
- Move east until reaching the next tape row to begin touching the fact checker, launching balls, etc.
Once the components were assembled, extensive testing, debugging, and refinement was required to get the bot ready to checkoff.
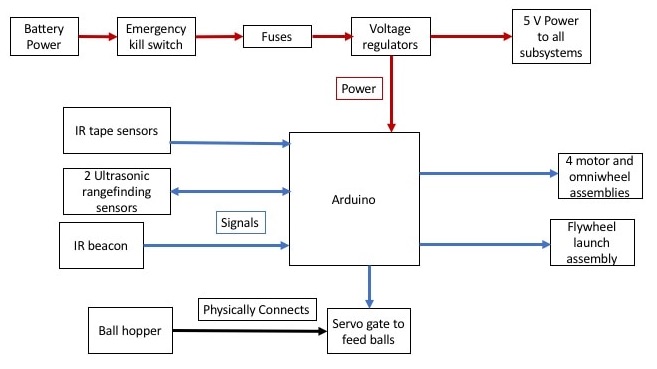
System block diagram outlining main components
Early Testing
We crunched some numbers early on to estimate the necessary alternative facts' trajectory, the specifications of the motor we would need, and the estimated power requirements. We then began prototyping each subsystem. A summary of these calculations and early tests can be found here.
|
Drive System
A video of our prototype drive system test can be found in the video below. This was later integrated into a custom laser cut chassis designed for our motors and wheels. We had issues with the couplers coming apart early on, but this was fixed by better supporting the motor shaft. We tested different ways to move with the omniwheels - either using 2 or 4 at a time. The 4 omni wheels simultaneously gave us the smoothe Ultrasonic Sensors
Key to our strategy of moving around the playing field was the accuracy of a pair of parallel ultrasonic sensors we planned to use to keep our bot parallel to the wall. We tested this setup very early on. We initially had these sensors aimed back towards the safe space at all times, but they were not incredibly accurate past about 1 meter. Therefore, we adjusted the design so that they would face forward towards the opposing launch beacons. This made them much more reliable. 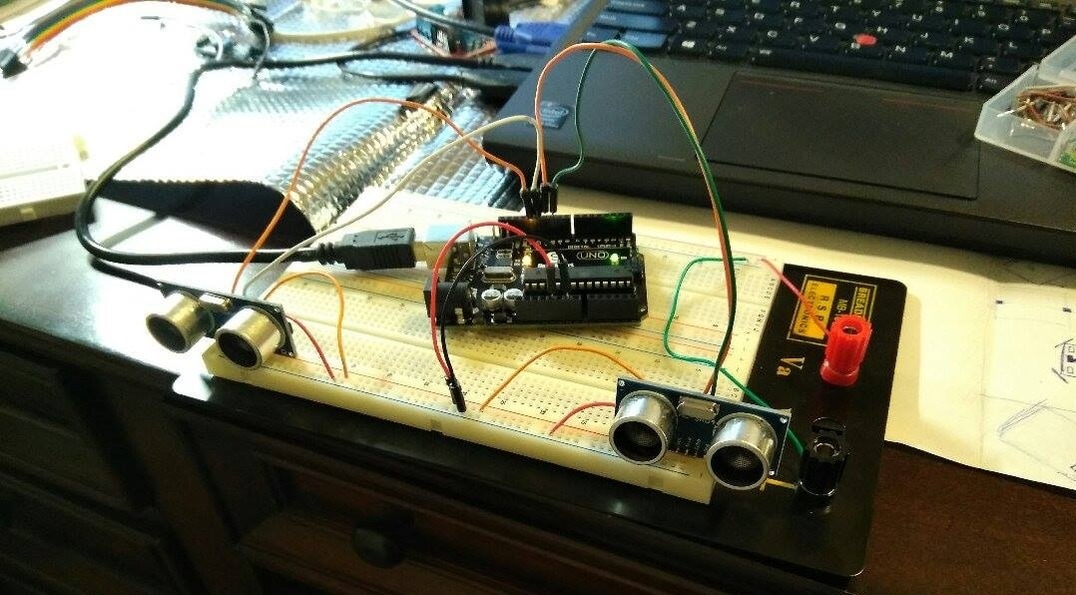
Tape Sensors
The tape sensors were fairly straightforward to design and implement. We had to replace one during development as it was not reading as high of reflectance as the second sensor, but this was no problem. The gif below shows the first test. 
|
Launch System
We discussed various spring, solenoid, and flywheel driven launch mechanisms for the alternative facts. We heard from alumni of 210 and 218 that flywheels worked the best for Nerf balls, and we were very fortunate to procure two complete flywheel launch mechanisms. This made our choice easy. We also changed the ball feeder from a funnel to a tunnel hopper design on the advice of the teaching team during design presentations 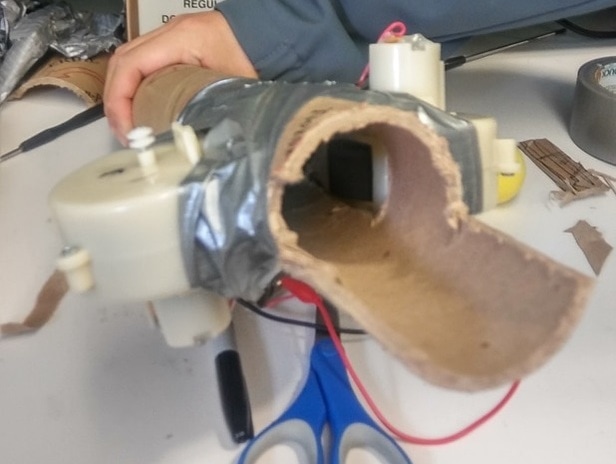
IR Beacon Sensor We needed to increase the gain on the IR beacon sensor several times in order to reliably detect the incoming signal from the IR beacons. No filtering was necessary for checkoff, but may have made the beacons slightly more reliable. We eventually added foam padding on either side of the phototransistor to reduce the chance of the robot aiming at the wrong tower. The photo below shows the prototype circuit based off of Lab 1. 
|
Reference
Here is the original project prompt: me210_project_w17_-_the_news_afakens.pdf
